FLP Impossibility的证明
作为分布式系统历史中最重要的一个定理之一, FLP是每个做分布式系统的开发人员都应该深刻理解的一个基础. 但是FLP的证明过程不是特别容易, 原文中作者撰文非常简练精确, 本文通过一些例子和不太严格但是容易理解的语言来帮助读者理解FLP的证明过程.
Model
Consensus定义:
- termination: 所有进程最终会在有限步数中结束并选取一个值, 算法不会无尽执行下去.
- agreement: 所有进程必须同意同一个值.
- validity: 最终达成一致的值必须是V1到Vn其中一个, 如果所有初始值都是vx, 那么最终结果也必须是vx.
首先, 排除Byzantine式故障, 只考虑crash recovery故障模型. 消息系统是异步的, 但是任何消息都会被接收一次且仅一次, 并且无法伪造或者丢失。这是比一般的异步网络更加可靠的一个网络模型. 这样收窄的一个模型如果在只有一个faulty进程的情况下都不能有一个完全正确的consensus protocol, 那么在更一般的异步网络或者包含Byzantine故障的模型里,更不可能在有一个faulty进程的情况下有完全正确的protocol. 这里完全正确(totally correct)是指同时满足safety和liveness. 在实际应用中, Paxos, Raft, PBFT都是保证safety但是不保证liveness的, 所以他们都不是完全正确的算法, 理论上存在进入无限循环的可能性(实际上概率非常低, 在工程中完全可以使用). 在当时可以说这是一个非常令人震惊的结论了, 给我们日常工程中很多问题判了死刑,比如分布式系统的缓存一致性和可用性,比如分布式事务的一致性和可用性等等.
关于本文中提到的异步网络和故障模型, 如果不清楚的请参考异步网络的故障模型.
下面开始介绍论文中的模型, 这个模型是一个通用的Consensus protocol, 定义为: 异步网络中的N个进程(N不小于2), 每个进程都有一个输入xp和输出yp的寄存器, 每个p的输入xp取值为{0, 1}其中一个, 这叫做一个进程的初始状态. 每个进程的表决结果输出到寄存器yp里, yp的取值范围为{b, 0, 1}, 其中yp的初始状态必须为b, 一旦产生表决结果则变成0或者1, 这时候这个进程的状态叫做decision state, yp不可以再变化. 每次内部状态的变化过程叫做transistion function, 他是deterministic的.
因为表决值只能是b(未决定), 0, 和1, 所以这是一个比较简化的模型. 这个protocol记作P.
这个P模型中的进程之间通过消息通信, 一个消息e = (p, m). 其中p是目标进程, m是消息值. 整个消息系统叫做message buffer, 相当于一个multiset(每个进程拥有自己的FIFO消息队列, 如同erlang信箱一样). message buffer里包含着已经发出但是还没有收到的消息. message buffer支持两个操作:
- send(p, m): 把一个消息(p, m)放到message buffer中.
- receive(p): p从message buffer删除并取得消息值m, 或者返回null. 前者表示消息被接收到, 如果message buffer为空后者表示没有p的消息, 如果message buffer为空表示无消息,或者p的消息传输被延迟(message buffer内的消息不变化). 注意, p的消息被延迟的次数有上限, 任何消息最终都会被收到.
一个configuration(状态)就是指所有进程的内部状态和message buffer状态. 整个系统总是从一个configuration变化为另外一个configuration. 这个变化过程叫做step, 一个step取决于message buffer返回消息的情况, 因为receive(p)返回的是M还是null, 而transition function是deterministic的, 所以下一个configuration取决于message buffer的返回值. 这个消息被接受处理的过程叫做event(p, m), 消息被延迟的事件叫做event(p, null). 这些steps叫做一个run, 如果结果的configuration有任何一个进程的yp={0,1}那么着叫做一个deciding run, 这个configuration已经有了表决结果. 因为只要有一个进程能够进入decision state,那么整个configuration就算是0-valent或者1-valent了.
一个configuration的一个schedule(事件序列)记作𝞂, 它包含了从这个configuration起, 一系列的事件. 比如(p1, m1), (p2, m2), (p3, m3)….
因为P是deterministic的,所以给定一个schedule能得出确定的结果。那么我们定义,如果一个configuration不需要依赖之后发生的事件,在当前的时间就能确定自身的状态,则称为n-valent。这个模型中有三种结果,yp = {0, 1, b}, 如果一个configuration如果无论后继的事件如何都会进入选择0的状态, 这叫做0-valent;如果总是会进入选择1的状态, 这个configuration叫做1-valent;如果当前还不能确定结果,还需要后继的事件才能确定结果是0还是1,那么这个configuration叫做bi-valent.
另外,对于论文中的模型,我们对本文开头的Consensus第二个条件弱化为只要有一个进程进入decision state即可。(这是为了简化模型)
至于论文中定义non-faulty进程为:
A process p is nonfaulty in a run provided that it takes infinitely many steps,and it is faulty otherwise.
所以faulty process定义就是可能执行了若干steps但是后来停止了的进程。这个概念非常重要,在证明的Lemma2和Lemma3中都需要引入一个faulty process p which takes no steps。
最后论文定义了什么是partially correct和totally correct.
对于一个P partially correct的定义为满足两个条件
- No accessible configuration has more than one decision value.
- For each v∈(0, I), some accessible configuration has decision value v.
对于一个P totally correct的定义为满足两个条件
- 他是partitially correct的。(agreement and valid)
- 每个有执行进度的run都是会进入终态的。(termination)
我们现在有了一个模型,然后论文开展了三个Lemma最后拼成结论。
Lemma 1
Suppose that from some configuration C, the schedulers 𝞂1, 𝞂2 lead to configurations C1, C2, respectively. If the sets of processes taking steps in 𝞂1 and 𝞂2, respectively, are disjoint, then 𝞂2 can be applied to C1 and 𝞂1 can be applied to C2, and both lead to the same configuration C3.
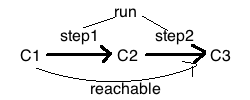
这条引理表示如果一个C里有两组事件, 每个事件(p, m)分别是在两组没有交互的进程上, 那么先使用任何一组事件再使用另外一组事件在C上, 结果都一样. 下图描述了这样的情况.
这个引理太容易理解了, 就不做证明了. 不过我们可以举个例子来描述一下: 比如Paxos的两阶段算法中, 假设有A, B, C, D,E五个节点, 𝞂1是B收到了A的第一阶段消息, 𝞂2是D/E收到了C的第一阶段消息(假设网络有延迟,D/E还没收到A的第一阶段消息,B还没收到C的第一阶段消息). 因为A/B是一组进程, C/D/E是一组进程, 𝞂1和𝞂2分别作用于这两组不相交的进程上.那么无论是先𝞂1, 𝞂2的顺序被送达还是按照𝞂2, 𝞂1的顺序, 最终结果都是C3。前面模型中提到的message buffer可能返回空就很好的模拟了这种消息延迟或者短暂的发生网络分区的情况.
Lemma 2
P has a bivalent initial configuration
任何一个协议P一定会有bivalent初始configuration. 这是由于异步网络的本质造成的. 因为异步网络的消息顺序不一定, 所以对同一个初始configuration都可能会运行产生不同的结果. 证明如下:
反证法, 假设协议P没有bivalent initial configuration, 那么P的initial configuration不是0-valent就是1-valent. 我们把所有只差一个进程的p上的xp变量不同的两个initial configuration叫做相邻(adjacent).
由本文开头提到的Consensus的第三点validity要求, {0,0,0}一定是0-valent的,而{0,0,1}和{0,1,1}可能是0-valent的,也可能是1-valent的。也就是说一个initial configuration中的xp只要包含了0,那么就有可能是0-valent的,如果xp包含了1,那么就有可能是1-valent的。但是如果全部xp都是0的configuration一定是0-valent的,同样全部xp都是1的configuration也一定是1-valent的,所以如果P没有bivalent initial configuration那么一定是同时包含了0-valent 和 1-valent的initial configuration(因为initial configuraiton至少包含了{0,0,0}和{1,1,1})。
进一步思考, 并使用前面提出的adjacent的概念,因为同时存在0-valent和1-valent的initial configurations, 假设他们是C和C’, 那么从C到C’一定有一个路径上, 至少存在一处adjacent的C0和C1, 使得C0是0-valent, C1是1-valent. 下图是一个只有三个进程(p0, p1, p2)的所有initial configuration(xp1, xp2, xp3)的情况, 线条连接的是相邻的两个initial configuration. (注意,这里的路径不是指变化路径,他只是表示initial configuration的相似性)
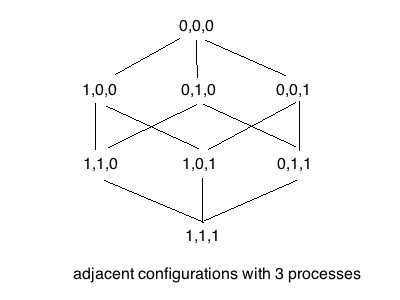
为什么说“一定存在相邻的C0和C1“呢?看这个图,明显{0,0,0}肯定是0-valent, {1,1,1}肯定是1-valent,那么我们把他们当作C和C’, 显然这是个连通图,所以他们俩是reachable的,那么他们之间的某个路径上一定存在从0-valent变化到1-valent的地方。这个例子中在{0,0,0} - {0,1,0} - {1,1,0} - {1,1,1}这条路径上, {0,1,0}和{1,1,0}很有可能就是C0和C1的分界点(假设{0,1,0}是0-valent,{1,1,0}是1-valent), 也可能在其他路径上,比如如果{0,1,0}是1-valent,那么分界点就在{0,0,0}和{0,1,0}了。无论如何一定存在一对相邻的initial configuration分别是0-valent和1-valent。
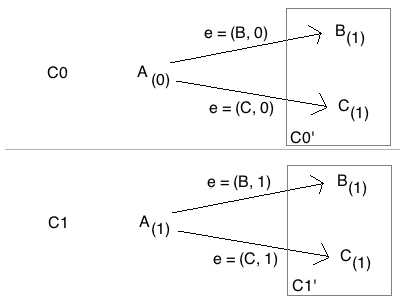
假设p是C0和C1这两个initial configuration之间初始状态不同的那个进程, 如果p是faulty的(原文takes no steps), p不再从buffer里获得任何消息也不发送消息, 那么C0和C1如果排除了p之后其实状态是一样的, 那么排除了p之后C0上的某个事件序列𝞂也可以应用在C1上, 而且结果相同. 假设结果是1,因为C0是0-valent的, C0不应该得到1,这就矛盾了。同样,如果结果是1,C1是1-valent的, 也矛盾了。
这个引理的本质是:一个故障节点停止接受消息, 会使结果不确定偏离原本的预定结果(原本C0/C1分别确定0和1,引入一个faulty process之后结果相同,要么都是0要么都是1). 举个例子, 我们设计一个consensus算法, 规则如下: 有A/B/C三个节点, A作为leader对B/C做类似于两阶段提交的询问, A先告诉B/C期望的结果, B/C接受并返回应答, 只有收到应答之后A才能做出决定并发出第二个请求给B/C做提交, 如果A发生了故障, 那么B作为leader对C询问. 我们要求这个算法允许一个faulty节点但是不影响结果正确性。那么我们设计一个0-valent的C0和一个1-valent的C1分别如下:
C0=A建议0给B/C. B/C自己都倾向于1. (C0={0,1,1}并且它是0-valent)
C1=A建议1给B/C. B/C自己都倾向于1. (C1={1,1,1}并且它是1-valent)
明显, 如果没有任何故障, C0结果是0, C1结果是1. 因为C0和C1只差一个进程A不同, 假设A进程挂了, 那么C0’和C1’其实是一样的, 这时候他们俩结果应该是一致的, 应该都是1. 但是这和C0就算有一个faulty节点也应该结果为0矛盾, 所以在一个faulty process存在的情况下不可能所有的initial configuration都是确定0-valent或者1-valent的,一定存在不确定的initial configuration.
我们通过反证法证明了一个协议P必然包含bivalent initial configuraiton. 本质上这是异步网络中一个没有响应的节点导致的结果不确定性. 其实Lemma 2如果这样讲会更容易理解:
P has a bivalent initial configuration when there is a faulty process.
这个Lemma说明了如果有一个faulty process,那么开始的时候就有不确定性了。接下来我们还要证明起始不确定,发展也会不确定。
Lemma 3
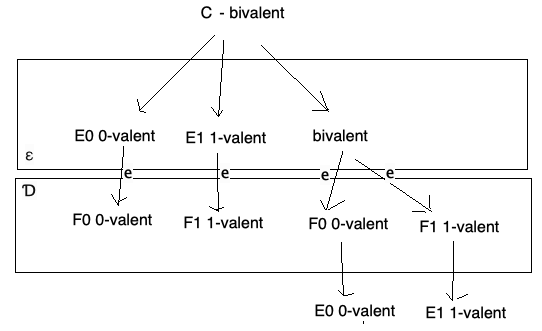
Let C be a bivalent configuration of P, and let e=(p, m) be an event that is applicable to C. Let ε be the set of configurations reachable from C without applying e, and let Ɗ = e(ε) = {e(E) when E ∈ ε and e is applicable to E}. Then, Ɗ contains a bivalent configuration.
这是整个证明的核心部分, 这部分比较难理解. 首先C不是initial configuration了, C可能是某个中间过程的configuration, 然后C是bivalent的. 假设e=(p, m)这个消息是可以应用于C的, 那么不用e所能达到的所有configuration应该是一幅图. 这个图就是ε. ε内任何一个configuration再用e就跳出ε, 并得到了一个集合Ɗ. 每一个’ε边界’上的configuration就是E, 因而有Ɗ=e(E).
如果把e用于ε中某一个configuration, 那么相当于ε中离起始的C越远的configuration收到e越晚. 由于我们定义了ε中所有configuration都还未接受e, 所以e只会发生在ε到Ɗ的边界上, 实际上就是把e看作离开ε进入Ɗ的最后一个消息. e会把ε内每一个configuration映射到Ɗ中一个configuration.
我们要证明Ɗ包含bivalent configuration。如果能证明,说明一个bivalent configuration C in ε可以通过e到另外一个bivalent configuration D in Ɗ, 然后D作为一个bivalent configuration可以通过另外一个e’,属于另外一个ε’, 发展到另外一个Ɗ’, 如果我们构造一个巧合的消息处理顺序,不断接受e和e’,我们就可以周而复始保持bivalent状态。
Lemma 3 第一步 Ɗ同时包含0-valent和1-valent
我们反证它. 假设Ɗ没有bivalent configuration, 那么Ɗ只能包含0-valent 或者 1-valent. 也就是说e会把ε中每一个configuration变为(映射为)Ɗ 中的一个0-valent或者1-valent configuration. 按照这个思路, 因为C是bivalent, 所以C可以到达0-valent和1-valent,假设他们是Ei, i = {0, 1}. 接下来分两种情况分析:(此处不要把Ei和lemma 3中的E混淆,二者含义不同, Ei此处不一定属于ε)
- 如果Ei属于ε, 说明Ei还没有收到e, 那么Ei收到e之后变为Fi=e(Ei), Fi显然属于刚才我们定义的Ɗ。
- 如果Ei不属于ε, 说明Ei已经收到了e,那么必然存在Fi ∈ Ɗ, 使C收到e后到达Fi,然后再到达Ei。
以上两种情况Fi都是在Ɗ里的,所以Fi一定不是bi-valent的,一定是i-valent的。而且Ei和Fi要么Ei可达Fi,要么Fi可达Ei。
因为C是bivalent, 所以同时存在E0/E1, 那也就同时存在F0/F1. 所以Ɗ总是同时包含0-valent和1-valent.
作者并没有提到如果Ei在ε之外但是属于Ɗ的情况,我想是因为太简单了,明显也会导致Ɗ同时包含0-valent或者1-valent,所以没提及.
Lemma 3 第二步建立neighbour configurations
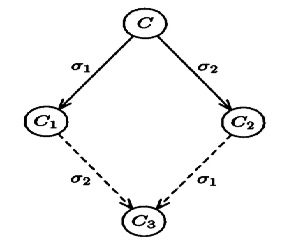
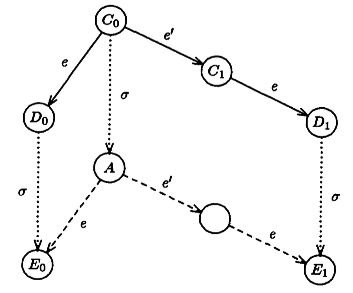
那么我们按照这个假设, 我们从ε中找两个neighbour configurations, C0和C1, 使得C0通过一条消息e’= (p’, m’)得到C1(此处C0和C1不表示他们是0-valent和1-valent, 0/1下标只是为了容易区分). 那么e能够把C0变成D0状态, e也可以把C1变成D1状态, 和刚才C下标含义不同,这里D0/D1是属于Ɗ 的0-valent和1-valent. 如下图所示:
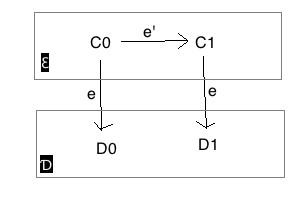
接下来我们又要分两种情况讨论.
Lemma 3 第二步 情况1
第一种比较简单, 如果e’和e所接受消息的p’和p不同, 那么从C0开始, e’和e所作用的进程是离散不相交的, 根据lemma 1, C0上用了e再用e’和先用e’再用e的结果应该是一样的. 根据lemma 1, 我们把这个图稍微旋转一下, 会看到这样一幅图. 其中D0和D1可以是属于Ɗ的, 分别是0-valent或1-valent.
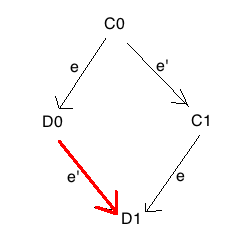
红色是根据lemma 1加上去的, 但是这条红色的会把一个0-valent的D0变成1-valent的D1, 这是明显矛盾不可能的. 所以第一种情况不存在.
Lemma 3 第二步 情况2
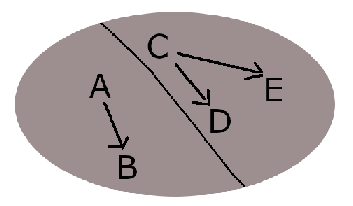
再看第二种情况, 假设p’和p相同, 那么e和e‘都是p上的消息. 这种情况更复杂一点. 假设p is faulty, 任何一个从C0开始不含p的消息(e和e’)的有限步数的deciding run会得到一个0-valent或者1-valent的configuration A, 我们把这个deciding run的事件序列标记为𝞂. 因为𝞂不含p的事件, 所以它和e作用的进程不相交, 那么用lemma 1可以得出下图中的E0. 同理, e’和e都作用于p, 所以e’和e的事件序列和𝞂作用的进程也不想交, 根据lemma 1可以得到E1.
因为E0和E1都经过了e,因而他们都属于E(经过Ɗ)的,因此他们可以分别是0-valent和1-valent的。
那么我们可以看出A可以变成E0也可以变成E1, 这说明A是bivalent的. 但是这和A是一个deciding run的结果矛盾. (A要么0-valent要么1-valent).
Lemma 3 结论: Ɗ 一定包含bivalent configuration.
至此p=p’和p!=p’的两种情况在我们的反证假设下都矛盾, 因此反证假设错误. Lemma 3 证明完成, 即: Ɗ 一定包含bivalent configuration.
三个Lemma都证明结束后, 我们来推导最终FLP定理.
FLP Theorem
No Consensus protocol is totally correct in spite of one fault. (in an asynchronous system)
根据Lemma 2, 如果有一个faulty process那么P一定含有bivalent initial configuration, 那么任何从这个bivalent状态进入univalent的deciding run, 其中必然存在一个从bivalent到univalent的关键步骤, 这个步骤决定了最终结果. 我们接下来就是要证明系统中总是有可能会把这个步骤无限推迟下去.
我们设计一个队列, 把所有进程放到这个队列中, 按照FIFO的顺序每次一个进程出来, 这个进程从message buffer取出第一个此进程的消息, 把计算后发给其他进程的消息放回message buffer尾部, 然后进程自己回到队列尾部等待下一轮调度. 这个模型保证了每个进程总是有机会获得发送给他的消息. 根据Lemma 2我们知道一定会存在一个bivalent的configuration C0, 从C0开始执行到某一个bivalent的C(C属于边界集合ε), 这时候message buffer中待处理的C的消息是e. 再根据Lemma 3我们知道那么C一定会通过e再产生一个bivalent configuration C’(属于Ɗ). 而C’是bivalent的,那么C’ 同理就可能通过某个e’进入C,算法会再次产生e和e’进入message buffer。这意味着可以通过控制消息顺序,让一个bivalent configuration再产生一个bivalent configuraiton, 因为可能会永远无法达到一个univalent configuration, 也就永远无法产生结果.
看到这里有些人会问,证明你都讲完了,我怎么还没看出来,异步网络体现在哪里了?一个故障节点体现在哪里了?
总结一下:
- asynchronous network体现在模型的message buffer的non-deterministic。message buffer消息顺序不确定性体现在某一轮某个进程p从buffer取出来null,这就是说消息有不确定的延迟,别的进程p’因而先从message buffer拿到了消息,因而下一轮产生不同的configuration,展开了一个巨大的连通图(所有的run)。
- one faulty process是体现在Lemma 2的假设里的, 基于有一个faulty process因此才有了至少有一个initial configuration是bivalent的结论. 否则没有一个faulty process的话Lemma 2是不成立的。
- Lemma 2表达了初始的不确定性,Lemma 3表达了从不确定的configuration运行过程可以保持不确定性。 所谓的total correct就是同时满足agreement, validity, termination。FLP证明了在异步网络有一个故障节点的时候termination是无法满足的, 这时候只满足两个条件,所以是partial correct。
- 异步网络中safety (agreement + validity) 和 liveness (termination) 是不能同时满足的(total correct)。partial correct只满足safety。
- 我们常见的Paxos/Raft都是partial correct。只是实际工程中我们通过增加随机性来降低无法termination的可能性,因而让这些算法尽量接近total correct,但是理论上是永远无法达到的。
这是一个非常精妙的证明。证明过程不繁琐,但是我觉得,Nancy Lynch这些人能作为pathfinder想到这个思路真的非常了不起。
实际例子
Paxos有时候可能会多个回合才能决定结果, 错误的实现甚至会导致live lock. 比如大家从一个bivalent configuration开始(根据Lemma 2,一定存在),proposer A提出n1, proposer B提出n2, 如果n1 > n2, acceptor先接受了n1, B收到拒绝之后重新发起n3, 如果n3先于A的确认消息到达acceptor(异步网络消息顺序不确定性), 而且n3 > n1, 那么acceptor会拒绝A, 接受B, A可能会重复B的行为, 然后无限循环下去(Lemma 3保持bivalent).
参考
- Michael J. Fischer, Nancy A. Lynch, Michael S. Paterson. “Impossibility of distributed consensus with one faulty process” **Journal of the ACM April 1985 https://doi.org/10.1145/3149.214121*